|
|

RCX- Scoopbot - Remote Instructions
 |
Scoopbot was one of the very first RCX projects with my Lego Mindstorms
set (1.0). Consequently, this project is neither difficult to build or complex
to program. I would therefore recommend that this project is only built by beginners,
perhaps looking for a slightly more advanced project than what is in the book.
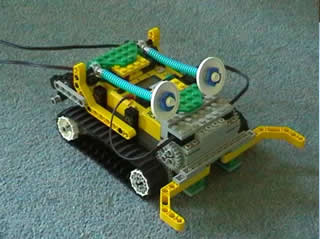
Scoopbot is a robot which is operated via a handheld remote control.
You can steer Scoopbot around, and use its front shovel to collect objects. You
can also use it to drive around an obstacle course.
Scoopbot is a good project to build as both the main base and
remote can be re-used for other projects.
|
If you just want to build Scoopbot and not bother about how or
why things are done, then just follow the steps below, if not, read on.
 |
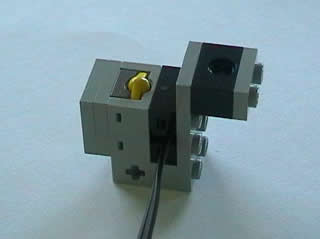
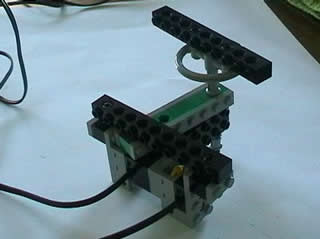
Building the Remote
The remote is the device that will actually operate the RCX. It is built by attaching
a rotating handle above two touch sensors. Turning the handle left moves it over
the left touch sensor and turning the handle right moves it over the right touch
sensor. If you are observant, you may notice that the remote idea has been stolen
from the Mindstorms Constructopedia.
There are 15 steps to build the remote, you can follow them below.
Where necessary, I have explained what is going on. Where pieces are lined up
in a row, it means that you are meant to connect them together.
|
Step 1
 |
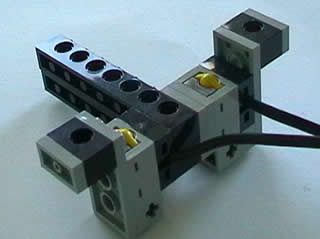
Step 2 - First touch sensor
 |
Step 3 - Make sure the wire is of the long sort
 |
Step 4 - Add the part from step 1
 |
Step 5 - Second touch sensor (+long wire)
 |
Step 6 - Add the part from step 1
 |
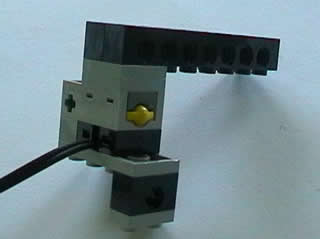
Step 7
 |
Step 8 - Add parts from step 7
 |
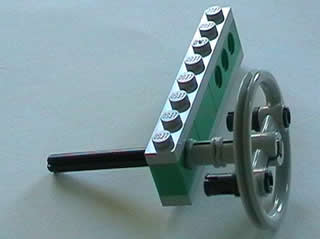
Step 9
 |
Step 10
 |
Step 11
 |
Step 12 - Add part from step 10
 |
Step 13 - Add part from step 9
 |
Step 14
 |
Step 15
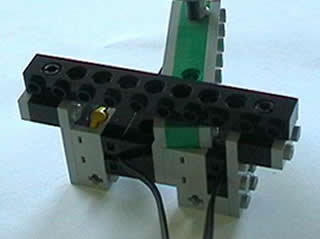 |
DONE!
|
|